
SIMULACION DE PROCESOS
Consiste en el diseño de un modelo matemático de un sistema, y la posterior ejecución de una serie de experimentos con la intención de entender su comportamiento bajo ciertas condiciones.
El modelo debe ser capaz de reproducir el comportamiento del proceso real con la mayor exactitud posible.
En general se lleva a cabo con dos propósitos:
– Diseño
– Operación bajo nuevas condiciones
LA TRANSFORMADA DE LA PLACE
La Transformada de Laplace es una técnica
Matemática que forma parte de ciertas transformadas integrales como la
transformada de Fourier, la transformada de Hilbert, y la transformada de
Mellin entre otras. Estas transformadas están definidas por medio de una
integral impropia y cambian una función en una variable de entrada en otra
función en otra variable. La transformada de Laplace puede ser usada para
resolver Ecuaciones Diferenciales Lineales y Ecuaciones Integrales. Aunque se
pueden resolver algún tipo de ED con coeficientes variables, en general se
aplica a problemas con coeficientes constantes. Un requisito adicional es el
conocimiento de las condiciones iniciales a la misma ED. Su mayor ventaja sale
a relucir cuando la función en la variable independiente que aparece en la ED
es una función seccionada.
Cuando se resuelven ED usando la técnica de la transformada,
se cambia una ecuación diferencial en un problema algebraico. La metodología
consiste en aplicar la transformada a la ED y posteriormente usar las
propiedades de la transformada. El problema de ahora consiste en encontrar una
función en la variable independiente tenga una cierta expresión como
transformada.
Sea f una función definida para
, la transformada de Laplace de f(t) se define
como

La
Transformada inversa de una función en s, digamos F(s) es una
función de t cuya transformada es precisamente F(s), es decir:

si es que acaso

Esta definición obliga a que se cumpla:

y


EJERCICIOS DE TRANSFORMADA DE LA PLACE
Ejercicio No1.

Ejercicio No2.

Ejercicio No3.

Ejercicio No4.

Ejercicio No5.

por partes

Aplicamos la formula

Entonces

Pero:

Entonces

Ejercicio No6.

por partes

Ejercicio No7.

Ejercicio No8.

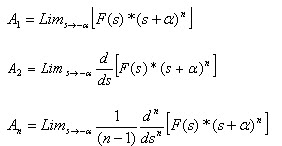
EJERCICIOS DE INVERSA DE LAPLACE
·
Raíces reales no repetidas

Entonces

Ejercicio No1.

Entonces

Ejercicio No2.

Raíces repetidas

Entonces
Ejercicio No1.

DIAGRAMAS DE BLOQUES
Un sistema de control puede tener varios componentes. Para mostrar las funciones que lleva a cabo cada componente en la ingeniería de control, por lo general se usa una representación denominada diagrama de bloques.
Un diagrama de bloques de un sistema es una representación gráfica de las funciones que lleva a cabo cada componente. Tal diagrama muestra las relaciones existentes entre los diversos componentes.
En un diagrama de bloques se enlazan una con otra todas las variables del sistema, mediante bloques funcionales. El bloque funcional o simplemente bloque es un símbolo para representar la operación matemática que sobre la señal de entrada hace el bloque para producir la salida.
La figura muestra un elemento del diagrama de bloques. La punta de flecha que señala el bloque indica la entrada, y la punta de flecha que se aleja del bloque representa la salida. Tales flechas se conocen como señales.


Observe que las dimensiones de la señal de salida del bloque son las dimensiones de la señal de entrada multiplicadas por las dimensiones de la función de transferencia en el bloque.
Un diagrama de bloques contiene información relacionada con el comportamiento dinámico, pero no incluye información de la construcción física del sistema. En consecuencia, muchos sistemas diferentes y no relacionados pueden representarse mediante el mismo diagrama de bloques.
REDUCCIÓN DE UN DIAGRAMA DE BLOQUES
Es importante señalar que los bloques pueden conectarse en serie, sólo si la entrada de un bloque no se ve afectada por el bloque siguiente. Si hay efectos de carga entre los componentes, es necesario combinarlos en un bloque único.
Un diagrama de bloques complicado que contenga muchos lazos de realimentación se simplifica mediante un reordenamiento paso a paso mediante las reglas del álgebra de los diagramas de bloques. Algunas de estas reglas importantes aparecen en la tabla y se obtienen escribiendo la misma ecuación en formas distintas.
La
simplificación de un diagrama de bloques mediante reordenamientos y
sustituciones reduce de manera considerable la labor necesaria para el
análisis matemático subsecuente. Sin embargo, debe señalarse que,
conforme se simplifica el diagrama de bloques, las funciones de
transferencia de los bloques nuevos se vuelven más complejas, debido a
que se generan polos y ceros nuevos.
REGLAS DE ALGEBRA PARA BOQLES

La simplificación de un diagrama de bloques mediante reordenamientos y sustituciones reduce de manera considerable la labor necesaria para el análisis matemático subsecuente. Sin embargo, debe señalarse que, conforme se simplifica el diagrama de bloques, las funciones de transferencia de los bloques nuevos se vuelven más complejas, debido a que se generan polos y ceros nuevos.
REGLAS DE ALGEBRA PARA BOQLES

La simplificación de un diagrama de bloques mediante reordenamientos y sustituciones reduce de manera considerable la labor necesaria para el análisis matemático subsecuente. Sin embargo, debe señalarse que, conforme se simplifica el diagrama de bloques, las funciones de transferencia de los bloques nuevos se vuelven más complejas, debido a que se generan polos y ceros nuevos.
Al simplificar un diagrama de bloques, recuerde lo
siguiente:
1. El producto de las funciones de transferencia en
la dirección de la trayectoria directa debe ser el mismo.
2. El
producto de las funciones de transferencia alrededor del lazo debe ser
el mismo.
EJERCICIOS DE BLOQUES
EJERCICIOS DE BLOQUES
EJERCICIO No
1


DIAGRAMA DE FLUJO DE SEÑAL
Una gráfica de flujo de
señal se puede ver como una versión simplificada de un diagrama de bloques,
cuyos elementos básicos son los siguientes:
Nodos: se utilizan para expresar variables.
Ramas: Son segmentos lineales que tienen ganancias y
direcciones asociadas. La señal se transmite a través de una rama solamente en
la dirección de la flecha.
Nodo de entrada
(fuente): Es un nodo que tiene
solamente ramas de salida.
Nodo de salida (pozo): Es un nodo que tiene solamente ramas de entrada.
Trayectoria: es una sucesión continua de ramas que se dirigen en
la misma dirección.
Trayectoria directa: es una trayectoria que empieza en un nodo de entrada
y termina en un nodo de salida, a lo largo de la cual ningún nodo se atraviesa
más de una vez.
Lazo: es una trayectoria que se origina y termina en el
mismo nodo y en donde ningún otro nodo se atraviesa más de una vez.
Ganancia de la
trayectoria: Es el producto de las
ganancias de las ramas de una trayectoria.
Lazos disjuntos: Son lazos que no comparten ningún nodo en común.
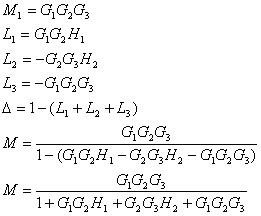
A partir de estas
definiciones es posible plantear el uso de la Fórmula de
Ganancia de Mason para reducir Diagramas de Flujo de señal.
Fórmula de Ganancia para
gráficas de Flujo de señal:

En donde:
yent = Variable del nodo de entrada
ysal = Variable del nodo de salida
M = Ganancia entre yent y ysal (Función de
Transferencia)
N = Número total de trayectorias directas entre yent y
ysal
Mk = Ganancia de la trayectoria directa k-ésima entre yent
y ysal
D = 1 – (suma de las
ganancias de todos los lazos)+(S productos de las ganancias de todas las
combinaciones de 2 lazos disjuntos)-(S productos de las ganancias de todas las
combinaciones de 3 lazos disjuntos)+...
Dk = igual a D pero
eliminando todos los lazos que toquen a la k-ésima trayectoria directa.
EJERCICIO No
1



EJERCICIO No 2

EJERCICIO No 3


EJERCICIO No4


EJERCICIO No5


TALER FINAL
Estabilidad de Sistemas Dinámicos
La estabilidad (asociada
a conceptos relacionados con la respuesta dinámica de un sistema) es una
propiedad fundamental de los sistemas de control, tan importante como la
robustez, el rendimiento y otras características que lo identifican.
El análisis de estabilidad
de los sistemas no lineales es un problema complejo donde no existe una técnica
común que pueda resolver todos los casos que se presentan. Al mecanismo de
modelado se le exigen altas prestaciones, puesto que las técnicas de
estabilidad en tiempo continuo están más desarrolladas y extendidas que el
análisis en tiempo discreto, por lo que la incorporación de retrasos en las
variables de control y salida de la planta, que mejoran el modelo, no se
pueden realizar.
Teoría de Lyapunov
Es la más
generalizada de las herramientas para el estudio de la estabilidad de
sistemas. Esta teoría estábasada en el trabajo “El problema general de la
estabilidad del movimiento” del matemático ruso Alexandr Mikhailovich
Lyapunov publicado en 1892. La potencia de este método es su generalización, puede
aplicarse a sistemas tanto variantes en tiempo (sistemas no autónomos) como
invariantes en tiempo (sistemas autónomos), independiente del orden del
sistema.
Existen dos
métodos fundamentales de análisis:
·
Método
indirecto: Presupone que la estabilidad de un
sistema no lineal próximo a un punto de equilibrio es aproximado a un sistema
equivalente linealizado, lo cual constituye una justificación teórica para el
uso del control lineal como método aplicable a plantas inherentemente no
lineales.
Utiliza
la linealización de un sistema para determinar la estabilidad local en un punto
de equilibrio. Para un sistema no lineal
de la forma:
𝐱 = 𝐟(𝐱)
El
resultado de linealizar alrededor del punto de equilibrio en el origen del
espacio de estados x = 0, utilizando los primeros términos del desarrollo de la serie
de Taylor, es:

Si se evalúa el
Jacobiano J en el punto de equilibrio x = 0 (en el caso de que el punto de
equilibrio x = xe sea diferente de cero se puede cambiar el punto de
equilibrio al origen) y los autovalores de la matriz resultante tienen parte real negativa, entonces se cumple una
condición necesaria y suficiente para afirmar que el punto de equilibrio del sistema es asintóticamente estable.
Nótese que la anterior aseveración es válida sólo para el punto de equilibrio y
un espacio de estados alrededor del
mismo no muy lejano.
Ejemplo:
Suponga el
siguiente sistema:

Las derivadas
con respecto a las variables de estado cumplen
por lo que el
sistema resulta

Finalmente, al
evaluar en el punto de equilibrio x = 0,
se tiene que el sistema linealizado equivalente es

A continuación
se muestran algunos comportamientos de sistemas dinámicos (gráficos generados
por el programa pphase7) y los
autovalores de las matrices.

·
Método directo: Es una
generalización de los conceptos de energía asociados a un sistema mecánico: el
movimiento de un sistema mecánico es estable si la energía mecánica total
decrece con el tiempo. Basado en lo anterior, para determinado sistema se
define una función que se supone describe su energía (función de Lyapunov) y se
analiza si esta decrece.
Se basa en la representación matemática de un
principio físico: si la energía de un sistema se disipa de forma continuada, entonces el sistema debe converger
a un punto de equilibrio de dicho sistema. La formulación matemática se fundamenta en la búsqueda de una
función de Lyapunov que pueda caracterizar el comportamiento del sistema dinámico bajo estudio.
La siguiente figura representa a un sistema que muestra un comportamiento estable
La siguiente figura representa a un sistema que muestra un comportamiento estable

Este es el
método más general para determinar la estabilidad de sistemas no lineales y/o
variantes con el tiempo. Contrario al método indirecto de Lyapunov, este
método no requiere de la solución explícita de las ecuaciones diferenciales
para el análisis; es decir, se determina la estabilidad del sistema sin
resolver las ecuaciones de estado. Esto ofrece una gran ventaja porque, por lo
general, es muy difícil despejar las ecuaciones de estado no lineales y/o
variantes con el tiempo.
LOS CONTROLADORES PID



SISTEMA DE CONTROL
Es el conjunto de
dispositivos que colaboran en la realización de una tarea, donde el principio básico
del control es la regulación automática o guía de sistemas dinámicos o
dispositivos bajo
condiciones de estados
estacionarios y transitorios. El uso efectivo de estos resultados depende de varios factores como lo son:
La realimentación; lo cual hace posible el establecimiento
y mantenimiento de estabilidad en la operación
del sistema.
La disminución de la sensibilidad de
funcionamiento; para limitaciones de diseño, para variaciones de los parámetros de la planta y
no linealidades de la planta
La adaptación del
comportamiento del sistema a las características desconocidas o variables con el
tiempo.
Sus aplicaciones son muy
diversas pero es esencial en el control numérico de las maquinas herramientas, industrias de
manufactura, industria aeroespacial, diseño en la industria automotriz además en las operaciones
industriales como el control de presión, temperatura, humedad, viscosidad y
flujo en la industria de proceso.
COMPONENTES BASICOS SISTEMA DE
CONTROL
Un sistema de control básicamente
está compuesto por:
1. Objetivos de control
2. Componentes del sistema
de control
3. Resultados o Salidas
Según como se muestra en
la figura

DEFINICIONES B´ASICAS
Variable Controlada y
Manipulada: La variable controlada es la cantidad o condición
que se mide y se controla, y la manipulada es la cantidad o condición que el
controlador modifica para afectar el valor de la variable controlada.
Perturbación: señal que
tiende a afectar negativamente el valor de la salida del sistema.
Control Realimentado: se
refiere a una operación que en presencia de perturbaciones tiende a reducir la
diferencia entre la salida de un sistema y la entrada de referencia siendo esto
de manera continua con base a esta referencia.
SISTEMAS DE CONTROL EN LAZO ABIERTO-LAZO CERRADO
Sistemas en Lazo Abierto
Son sistemas en los cuales
la salida no tiene efecto sobre la señal de control, es decir, no se mide
la salida en estos
sistemas ni se realimenta para comparar
con la entrada. En estos sistemas, la precisión depende de la calibración y la
presencia de perturbaciones. Un esquema de este tipo s
Presenta en la figura

Sistemas en Lazo Cerrado o
Realimentados
Es un sistema que mantiene
una relación preestablecida entre la salida y la entrada de referencia comparándola
y usando la referencia como medio de control. En estos sistemas se alimenta al
controlador con la señal de error de actuación, la cual es la diferencia entre
la entrada y la señal de realimentación a fin de
reducir el error y llevar la salida del sistema a un valor conveniente. Su Representación es la que
muestra en la figura

COMPARACI´ON ENTRE SISTEMAS EN
LAZO ABIERTO Y LAZO CERRADO
Lazo Abierto
La estabilidad del sistema
no es un problema importante en este tipo de sistemas y es más fácil de lograr Son aplicables cuando se conoce con anticipación
las entradas y no existen perturbaciones
Se usan componentes relativamente precisos y baratos para obtener el control
adecuado.
Lazo Cerrado
La estabilidad es una función
principal en este tipo de sistema ya que puede conducir a corregir exceso de
errores que producen oscilaciones de amplitud constante y cambiante Son
aplicables cuando se presentan perturbaciones y/o impredecibles en los
componentes del sistema Emplea mayor cantidad de componentes siendo estos más
precisos y por ende más costosos. La realimentación vuelve la respuesta
insensible a las perturbaciones externas y variaciones internas en los parámetros
del sistema Una combinación adecuada entre controles de lazo abierto y cerrado es menos costosa y ofrecer ´a un desempeño
satisfactorio del sistema general.
AN´ALISIS EN EL DOMINIO DEL TIEMPO
El análisis en el dominio
del tiempo se relaciona con el estudio de la respuesta de los sistemas a la señales aperiódicas tales como: entrada escalón,
rampa, parábola e impulso.
Respuesta Transitoria y
Respuesta en Estado Estable
La respuesta en el tiempo
en un sistema de control consta de dos partes: la respuesta transitoria y la respuesta en estado
estable. Se entiende por régimen transitorio a la respuesta que va del Estado inicial al estado
final; y por régimen permanente a la manera en la cual se comporta la Salida del sistema
conforme el tiempo (t) tiende a infinito.
Sistemas de Primer Orden
Un típico sistema de
primer orden está representado físicamente por un circuito RC, un sistema térmico o algo similar, su
relación entrada salida se obtiene mediante:

su representación en
diagrama de bloques es el mostrado en la figura

En la siguiente figura se muestra un análisis de la respuesta del sistema de entrada escalón, e impulso unitario.
Sistemas de Segundo Orden
La función de
transferencia prototipo de un sistema de segundo orden en lazo cerrado es:

su representación en diagrama de bloques es la mostrada en la figura:
El comportamiento dinámico
de un sistema de segundo orden se describe en términos de los parámetros _ y ln,en base
a esto se clasifica el sistema de la siguiente manera:
1. Caso Sub amortiguado 0< _
< 1
2. Caso Críticamente amortiguado
_ = 1
3. Caso Sobre amortiguado _ > 1
A continuación se muestra
en la figura la respuesta típica al escalón unitario de un sistema de segundo
orden. donde:

Tiempo de Retardo td: es el tiempo requerido para que la respuesta alcance la primera vez la mitad del valor final.
Tiempo de Levantamiento tr: es el
tiempo requerido para que la respuesta pase del 10 al 90 por ciento, del 5 al
95 por ciento o del 0 al 100 por ciento de su valor final. Para sistemas sub amortiguados
suele usarse un tiempo de levantamiento de 0 a 100 por ciento; y para sistemas
Sobre amortiguados 10 a 90
por ciento.
Tiempo Pico tp: es el
tiempo requerido para que la respuesta alcance el primer pico del sobrepaso.
Sobrepaso máximo Mp: es el
valor pico máximo de la curva de respuesta medido a partir de la unidad. Si el
valor final en estado estable de la respuesta es diferente de la unidad, es común
usar el porcentaje de sobre paso máximo.
Tiempo de Asentamiento Ts: es el
tiempo que se requiere para que la curva de respuesta alcance un rango
alrededor del valor final del tamaño especificado por el porcentaje absoluto
del valor final y permanezca dentro de
el.
ANALISIS EN EL DOMINIO DEL LA FRECUENCIA
Se conoce con el termino
respuesta en frecuencia a la respuesta de un sistema en estado estable a una
entrada senoidal. En los métodos de la respuesta en frecuencia, la frecuencia
de la señal de entrada se varía en un cierto rango para estudiar la respuesta
resultante. El interés de tratar
Entradas sinusoidales esta
en que la respuesta del sistema a estas señales contiene información sobre la
respuesta a señales más generales. La salida en estado estable para una entrada
senoidal viene dada por el sistema:

La entrada r(t) es senoidal y se obtiene mediante:
si el sistema estable la salida c(t) se obtiene a partir de:

Su representación en diagrama de bloques es la mostrada en la figura

Representación Grafica de las Características de la Respuesta en Frecuencia
La función de
transferencia senoidal, función compleja de la frecuencia se caracteriza por su
magnitud y ´Angulo de fase, con la frecuencia como parámetro. Por lo general se
usan representaciones graficas de las
funciones de transferencias senoidales:
1. Trazas de Bode o Trazas
Logarítmicas
2. Traza de Nyquist o
Traza Polar
3. Traza de Magnitud Logarítmica
contra la Fase
4.2 Trazas de Bode
Los diagramas de Bode
consisten de un par de graficas: una que ofrece la magnitud |G(j!)| contra la
frecuencia y la otra que muestra el ´Angulo de fase _(j!) contra
la frecuencia. Un ejemplo de la raza de
bode se muestra en la figura

El eje de abscisas es logarítmico
en!, es decir, lineal en log(!), donde el logaritmo es de base
10. así se consigue una representación compacta sobre un rango amplio de
frecuencias. La unidad del eje es la década, es decir, la distancia entre ! y 10! para
cualquier valor de !. La magnitud de la respuesta en frecuencia
se mide en decibeles [dB], es decir, unidades de 20 log (!) La fase
se mide en escala lineal en radianes o grados.
ACCIONES
BASICAS DE CONTROL
Empezaremos con una clasificación
de los diferentes controladores industrial:
1. De dos posiciones o de
encendido y apagado (on-off)
2. Proporcionales
3. Integrales
4.
Proporcionales-Integrales
5.
Proporcionales-Derivativos
6.
Proporcionales-Integrales-Derivativos
5.1 Acción de Control
Proporcional Se basa en la relación entre la señal de salida del controlador u(t) y la señal
de error e(t).


o su equivalente en función de transferencia se obtiene aplicando transformada de Laplace


Acción de Control Integral

O bien:

donde:

Si se duplica el valor de e(t) el valor de u(t) varia dos veces mas rápido, cuando e(t) = 0, el valor de u(t) permanece estacionario es decir se mantiene el valor de la entrada del proceso. En ocasiones este es denominado también control de reajuste (reset); su representación en diagrama de bloques es el representado en la figura

Acción de Control Proporcional-Integral

o su equivalente en función de transferencia:


Su representación en diagrama de bloques es la mostrada en la figura



Su función de transferencia es:

Donde:






o su equivalente en función de transferencia se obtiene aplicando transformada de Laplace
Donde:
Kp se
considera la ganancia proporcional. Este tipo de controlador puede ser visto
como un amplificador con una ganancia ajustable, su representación es la
mostrada en la figura
Acción de Control Integral
El valor de la salida del
controlador u(t) se cambia a una razón proporcional a la señal de
error e(t), es
decir:

O bien:
donde:
Ki es una
constante ajustable su equivalente en función de transferencia es:
Si se duplica el valor de e(t) el valor de u(t) varia dos veces mas rápido, cuando e(t) = 0, el valor de u(t) permanece estacionario es decir se mantiene el valor de la entrada del proceso. En ocasiones este es denominado también control de reajuste (reset); su representación en diagrama de bloques es el representado en la figura
Acción de Control Proporcional-Integral
La acción de este controlador
se define mediante:
o su equivalente en función de transferencia:

Ambos parámetros son
ajustables, el tiempo integral ajusta la acción de control integral, mientras que
un cambio en el valor de la ganancia proporcional, afecta las partes integral y
proporcional de la acción de control. El inverso de Ti se
denomina velocidad de reajuste, esta indica la cantidad de veces por minuto que
se duplica la parte proporcional de la acción de control; su representación en
diagrama de bloques es el mostrado en la figura. la respuesta ante una entrada escalón
de un controlador PI
Efectos del Control
Proporcional-Integral
La aplicación de este tipo
de control produce los siguientes efectos sobre sistema a controlar:

Respuesta a entrada escalón de un
Controlador Proporcional-Integral
·
Mejora el amortiguamiento y reduce el sobre paso máximo
·
Incrementa el tiempo de levantamiento
·
Disminuye el ancho de banda
·
Mejora el margen de ganancia y de fase y la magnitud
de pico de resonancia
·
Filtra el ruido a alta frecuencia
·
El error en estado estable se mejora con un orden
es decir, si el error en estado estable a una entrada dada es constante, el
control PI lo reduce a cero.
Este tipo de controlador
se utiliza generalmente cuando se desea mejorar el error en estado estacionario.
Los sistemas se hacen normalmente mas oscilatorios, si no se ajusta
correctamente se puede hacer inestable.
Acción de Control
Proporcional-Derivativa
Esta acción de control se
define mediante:
Su representación en diagrama de bloques es la mostrada en la figura

señal de salida de este
tipo de acción, también llamada Control de Velocidad, es proporcional a la
velocidad de cambio de la señal de error. La constante es el intervalo de
tiempo durante el cual la acción de la velocidad hace avanzar el efecto de la acción
proporcional. La respuesta ante una entrada escalón de un controlador PD se
muestra en la figura

Efectos del Control
Proporcional-Derivativo
La aplicación de este tipo
de control produce los siguientes efectos sobre sistema a controlar:
·
Mejora el amortiguamiento y reduce el sobrepaso máximo
·
Reduce el tiempo de levantamiento y el tiempo de
asentamiento
·
Incrementa el ancho de banda
·
Mejora el margen de ganancia y de fase y la magnitud
de pico de resonancia
·
Puede acentuar el ruido en altas frecuencias
·
No es efectivo para sistemas ligeramente amortiguados
o inicialmente estables
·
El error en régimen permanente no es afectado a
menos que se varié con el tiempo
Acción de Control
Proporcional-Integral-Derivativa
Esta acción combinada
tiene las ventajas y efectos de las acciones de control PD y PI, su
Ecuación viene dada por:

Su función de transferencia es:

Donde:
Kp=
Ganancia Proporcional
Ti= Tiempo
Integral
Td= Tiempo
Derivativo
su representación en
diagrama de bloques es la mostrada en la figura

La respuesta ante una entrada
escalón de un controlador PID ideal se muestra en la figura

CONTROL PID CLASICO
La familia de
controladores de estructura fija o controladores PID, han mostrado ser robustos
y extremadamente beneficiosos en el
control de muchas aplicaciones de importancia en la industria
siendo el más ampliamente
utilizado en la industria moderna, controlando más del 95 porciento de los
procesos industriales en lazo cerrado.
Estructura de un PID
Para representar la
estructura de un controlador PID se considera un lazo básico de control SISO (única
entrada, única salida) el cual se presenta en la figura


REGLAS DE SINTONIZACI ON PARA CONTROLADORES PID
El proceso de seleccionar
los parámetros del controlador que cumplan con las especificaciones de desempeño se conoce como sintonización del controlador.
Es posible aplicar diversas técnicas de diseño con el fin de determinar los parámetros
del controlador que cumpla las especificaciones en estado transitorio y en
estado estable del sistema en lazo cerrado. Ziegler y Nichols sugirieron reglas para sintonizar los controladores PID
lo cual significa establecer valores Kp, Ti, Td; basados
en la respuestas escalón experimentales o en valor de Kp que se produce en
estabilidad marginal cuando solo se usa la acción de control proporcional. A continuación
se presentan las reglas Ziegler- Nichols, las cuales son muy convenientes
cuando no se conocen los modelos matemáticos
de las plantas.

EJEMLPO
La curva de respuesta en lazo abierto de un sistema de
control de temperatura de tope de una columna que separa la mezcla etanol-agua
es la que se muestra en la figura.

·
Sintonice un
controlador PI empleando el método de Ziegler y Nichols en lazo abierto
·
Compare
empleando índices de conducta apropiados cuánto mejoraría la respuesta si se
adiciona acción derivativa al controlador. Considere como perturbación un
escalón de magnitud uno en la composición de alimentación.
Sintonización
de controladores
El método de Ziegler y Nichols que emplea la curva de respuesta como
información para la sintonización, asimila la el comportamiento del lazo de una
forma simplificada con una constante de tiempo y tiempo muerto.

Los valores de la ganancia se calculan con los cambios permanentes:

y los parámetros dinámicos con la recta tangente de máxima pendiente:
t
= 12.5
min
L = 2 min


La regla de
sintonización para un controlador PI es:
Para un controlador PID tipo serie, la sintonización por el mismo método anterior resulta ser:
Para un controlador PID tipo serie, la sintonización por el mismo método anterior resulta ser:

Performance de control con controladores PI y PID
Para
analizar el comportamiento del sistema en lazo cerrado se debe tomar en cuenta
la perturbación tal como es esquematizado en la figura siguiente:

Haciendo uso
del programa s_loop1. En las figuras siguientes se ven los transitorios
con controladores PI y PID.


Suscribirse a:
Comentarios (Atom)